
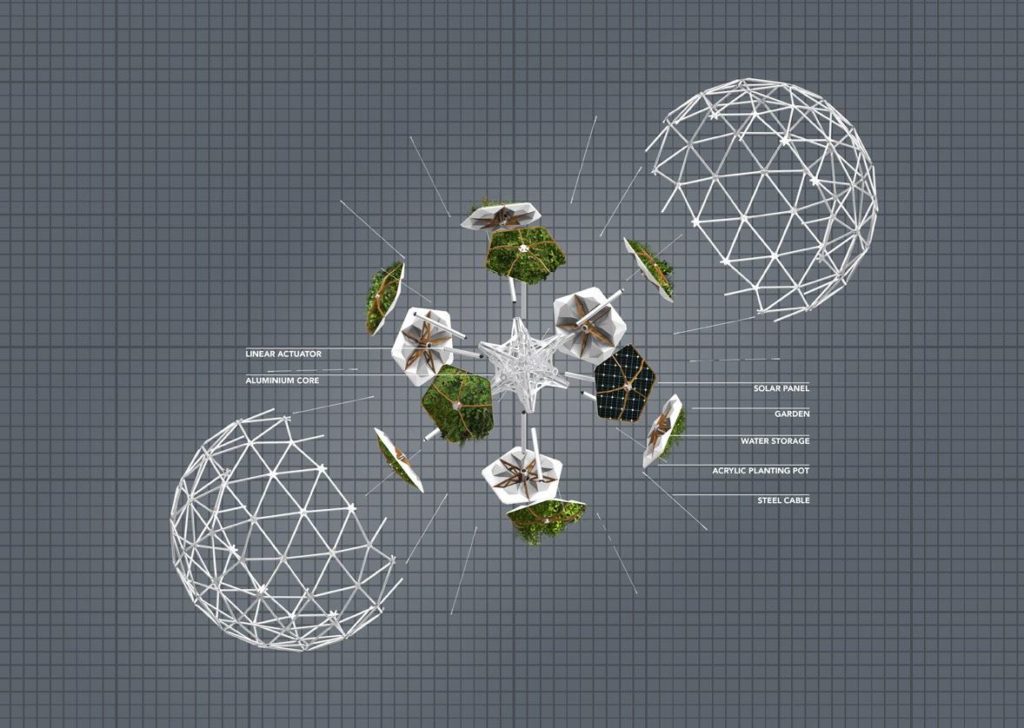
Really like this experimental project (spotted on a post on Architects Newspaper) by Interactive Architecture Lab. Called Hortum machina, B it’s a “rolling ecological exoskeleton” in the shape of a geodesic dome, the “half garden, half machine” hybrid is able to move through the environment using plant electro-physiology to drive the machine. The idea of plant intelligence is worthy of a much more expansive post, but the execution here is quite brilliant.

A quick breakdown of the idea, from the Interactive Architecture Lab website:
“Electro-physiological sensing of the state of individual plants collectively and democratically controls decision-making of the orientation of the structure and its mobility. In the near future context of driverless cars, autonomous flying vehicles, and seemingly endless other forms of intelligent robotics co-habiting our built environment. Hortum machina B is a speculative urban cyber-gardener.”
You get a feel for the scale of it here, which is part of the beauty. The idea that these are larger than life, which gives them added presence.

There’s some more detailed ‘making of’ description, which delves into the prototyping, and further exploring the engineering and programming.
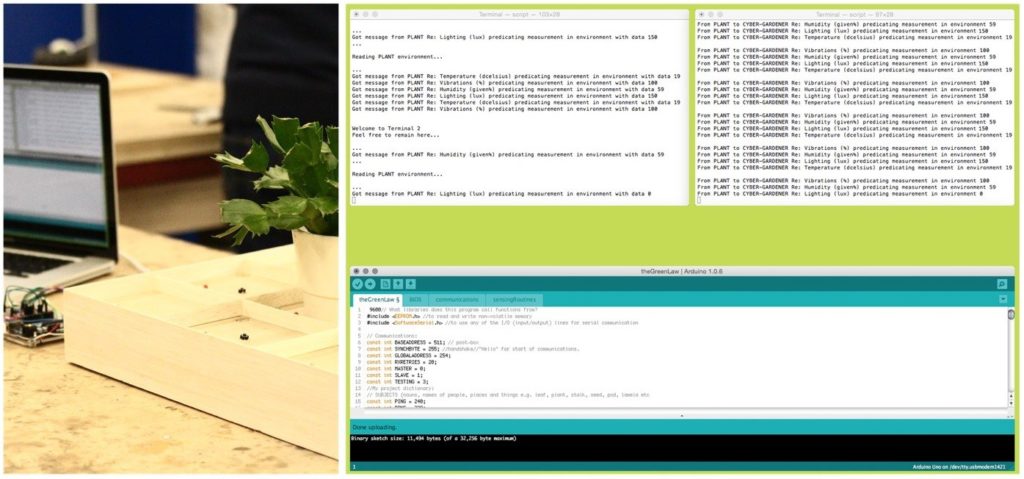
The controls are programmed using Arduino, a scalable and programmable platform for hardware and software to make interactive objects. Click on the screen capture below, and you can see the communication of ‘getting messages’ from the plant things like temperature, vibrations, humidity, lighting – and then being able to use that ‘intelligence’ for driving actions.
All Images above are credited to Interactive Architecture Lab – and accessed direct from their website or from the Architects Newspaper post. Also, check out this video with it in action – more videos on their Vimeo page and website as well.
Hortum machina, B from Interactive Architecture Lab on Vimeo.